Interpreting Signals
Linear Filters
Linear filters are the simplest way to transform raw bioelectrical signals into relevant information. With a linear filtering algorithm every input corresponds to a unique output according to a specific transfer function. The autoregressive moving average (ARMA) model is an adaptation of a linear filter that incorporates recent movement into the decoding of present movements (Fisher et al. 2005). Linear filters may be used alone or as elements of a larger interpretation algorithm. For example, linear Gaussian models are often used to estimate the noise in a system so that it may be removed. [15]
Statistical Algorithms
Statistical interpretation algorithms use bounding values, past inputs, and current outputs to decide what output most likely represents the original intention that created a signal. For example, if the previous thirty inputs to a system were interpreted as ‘rotate hand up’ and the current input to the system could either be interpreted as ‘rotate hand up’ or ‘spread fingers quickly’ the system will chose the output ‘rotate hand up’ because it is the most likely desired output according to the past outputs. Bounding values used in statistical algorithms for human-computer interfaces usually correspond to the limits of human motion—for example, the human hand can only move so fast or rotate so far. [15]
Neural Networks
Neural networks implement a sort of non-linear transform from input to output based on the relative “weights” of intermediate nodes arranged in a network. Neural networks must be calibrated by supplying known input-output pairs at the terminals of the network until the weights of the nodes can be reliably determined. Two specific types of neural networks that could be useful for human-computer interfaces are the time-delay neural network (TDNN) and the recurrent neural network (RNN). The TNN is advantageous because it incorporates past values of the system output into the decision of the current output. However, because of the many nodes necessary to implement a TDNN, the system is hard to calibrate because it requires many known input output pairs. The recurrent neural network has recurrent connections in the hidden layer, giving it fewer degrees of freedom than the TDNN but making calculations more time consuming. It is interesting to note that the neural network approach to biological signal interpretation attempts to decode a signal produced by a biological neural network using an electrical analog. [15]
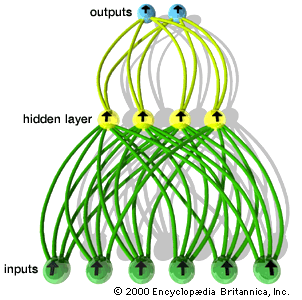
Figure 1. Neural Network
Divide and Conquer
In the divide-and-conquer approach to signal interpretation, a transfer function for the conversion from input to output is approximated by a mixture of linear filters determined by the state of the system. For example, in an experiment by Wood et al. in 2000 the decoding algorithm for a BCI device was switched back and forth between two filters depending on whether the subject was in an “active” of “inactive” state. The divide-and-conquer approach may also be extended to implement different transfer functions depending on the movement state of a system. For example, the system may implement one filter for a grabbing system state and another filter for a reaching system state. [15]
Feature Space Mapping
In a feature space mapping decoding algorithm, neural firing rates from different areas may be mapped into some feature space that determines the output of the system. For example, say the firing rates of two neurons are measured and used to form a one- dimensional vector that is then mapped into two-dimensional movement space like so:
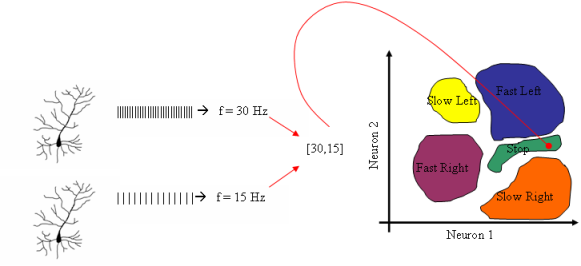
Figure 2. Feature Space Mapping
This approach can be extended to an N element vector composed of the firing rate of N neurons and used to decode neural signals. However, the feature space mapping method is rather computationally expensive which limits its applicability to real time human-computer interface systems. [15]
